Teknologi untuk mengetahui karakter bawah permukaan laut semakin berkembang. Setelah teknologi mengenai deep-tow saat ini telah berkembang teknologi aoutonomous underwater vehicle (AUV). Deep-tow merupakan alat untuk survei dasar laut yang dilengkapi kamera, ditarik menggunakan kabel yang diikat di kapal induk. Survei seperti ini kurang efesien karena memerlukan waktu sampai 6 jam untuk memindahkan line survei. Sedangkan, survei menggunakan AUV sangat efesien, waktu pindah line survei hanya memerlukan waktu beberapa menit saja. Selain itu data yang dihasilakan lebih baik dibandingkan menggunakan deep-tow. AUV merupakan robot survei dasar laut yang dapat memotret permukaan dasar laut dan dapat mengetahui kondisi dibawah permukaan dibawah permukaan. AUV digunakan untuk survei bawah permukaan yang dangkal seperti untuk geohazard, arkeologi, survei pipa gas, arkeologi,geoteknik dan struktur geologi. Alat ini sering digunakan untuk industri pengeboran minyak lepas pantai ataupun untuk kegiatan penelitian mengenai lingkungan.
AUV digerakan dengan menggunakan motor listrik. Sumber tenaga yang digunakan untuk menggerakan motor listrik berasal dari battre litium dengan durasi antara 24 jam sampai 40 jam. Lamanya durasi battre tergantung keperluan survei dan kondisi sekitar seperti temperature, kecepatan arus laut dan perangkat yang digunakan. Prinsip kerjanya AUV diturunkan dari kapal induk kemudian motor listrik yang ada pada alat tersebut menggarakan AUV untuk masuk kedalam air. Sistem navigasi yang ada pada AUV digunakan untuk menentukan arah dan posisi survey. Navigasi dan system penggerak pada AUV dapat dikontrol dari kapal induk. Program yang dirancangan pada AUV digunakan untuk segala macam keperluan termasuk dalam keadaan darurat sehingga AUV harus diangkat kepermukaan laut.. Komunikasi dilakukan dengan menggunakan frekuensi radio dan wireless local-area network (WLAN), local area network (LAN) apabila diluar jangkauan tersebut komunikasi menggunakan satelit.
AUV digerakan dengan menggunakan motor listrik. Sumber tenaga yang digunakan untuk menggerakan motor listrik berasal dari battre litium dengan durasi antara 24 jam sampai 40 jam. Lamanya durasi battre tergantung keperluan survei dan kondisi sekitar seperti temperature, kecepatan arus laut dan perangkat yang digunakan. Prinsip kerjanya AUV diturunkan dari kapal induk kemudian motor listrik yang ada pada alat tersebut menggarakan AUV untuk masuk kedalam air. Sistem navigasi yang ada pada AUV digunakan untuk menentukan arah dan posisi survey. Navigasi dan system penggerak pada AUV dapat dikontrol dari kapal induk. Program yang dirancangan pada AUV digunakan untuk segala macam keperluan termasuk dalam keadaan darurat sehingga AUV harus diangkat kepermukaan laut.. Komunikasi dilakukan dengan menggunakan frekuensi radio dan wireless local-area network (WLAN), local area network (LAN) apabila diluar jangkauan tersebut komunikasi menggunakan satelit.

Perangkat survey utama yang ada di AUV adalah multibeam echo sounder (MBES) yang digunakan untuk mengetahui morfologi bawah laut, kedalaman air dan reflektifitas bawah permukaan. Frekuensi yang digunakan untuk MBES antara 100 dan 400 k Hz. Hasil dari MBES dapat melihat kemiringan dari lereng permukaan dasar laut dengan baik. Selain MBES ada juga sidescan sonar (SSS) dan subottom profiler (SBP). SSS dapat memberikan informasi mengenai kondisi bawah permukaan secara kasar. Fungsi SSS hampir sama seperti MBES namun memiliki resolusi lebih tinggi. Frekuensi yang digunakan bervariasi antara 240 Hz, 250 Hz dan 1600 kHz. Dengan menggunakan frekuensi 1600 kHz maka akan menghasilkan resolusi yang detail namun lebar sapuan (Swath width) hanya 40 m. SBP dapat memberikan informasi mengenai reflektifitas bawah permukaan.. Frekuensi yang digunakan SBP adalah frekuensi tinggi dan frekuensi rendah. Rentang frekuensi yang digunakan antara 1 Hz sampai 24 kHz. Pada umumnya rentang frekuensi yang digunakan adalah 1-6 Hz dan 2-12 kHz. Dengan menggunakan dual frekuensi secara bersamaan maka hasil rekaman memiliki resolusi yang tinggi dan penetrasi yang dalam. Sample rate yang digunakan 23 atau 46 ms dan resolusi vertikal 0,3 m. Untuk meningkatkan kualitas data maka dapat dilakukan proses filtering dan automatic gain control (AGC). Interpretasi kedalaman yang dihasilkan SBP sekitar 150 m dibawah dasar permukaan laut. Penetrasi akan maksimal terjadi pada daerah yang lemah seperti batuan sedimen yang mengandung gas, sedangkan penetrasi akan terbatas atau tidak ada penetrasi sama sekali di dalam batuan sedimen padat. Selain perangkat utama tadi AUV juga dilengkapi dengan kamera scanner, magnetometer,temperatur dan sensor salinity.
Sistem navigasi yang digunakan adalah inertial navigation system (INS) dibantu dengan Doppler velocity log (DVL). INS menenentukan posisi dan kecepatan menggunakan frekuensi tinggi dari inertial measurement unit (IMU). Data selain dari INS dapat digunakan untuk mengupdate data INS. Penentuan posisi dapat diperbaharui dengan menggunakan data yang bersumber dari GPS permukaan, acoustic ultrashort baseline (USBL) transponder akustik dan batimetri. Error untuk penenuan posisi AUV relatif kecil yaitu 0,03 %.
Data hasil survei AUV ditransmisikan secara real time ke operator yang ada dikapal induk untuk dilakukan quick interpretasi. Pengolahan data juga dilakukan untuk menghasilkan digital terrain model (DTM) dan gambaran backscatter dasar laut dari perekaman MBES. Data SBP juga dapat dikonversika dalam bentuk SEG-Y. Untuk memberikan informasi akurat mengenai kedalaman air dan bentuk dasar laut, data MBS dikorekasi terhadap kedalaman AUV, ketinggian, kecepatan suara, Pasang surut dan beberapa faktor yang lain. Data SSS dikoreksi untuk distorsi yang disebebkan oleh kemiringan dan menghilangkan kolom air.berikut ini merupakan hasil dari AUV. Gambar 2 hasil dari MBES. Terlihat permukaan dasar laut yang komplek dan lereng dengan ketinggian 15 m dan kemiringan 30 derajat. Gambar 3 data AUV SSS. Menunjukan outcrop permukaan yang tidak teratur dan halus. Gambar 4. Data AUV SBP. Bentuk 3d mikrovolum dari data seismik envlope dengan dimensi area survey 390x 500m line spasi 4 m, spasi bin 4 x 0,5 m frekuensi 2-12 kHz dengan kedalaman 40 m dibawah dasar laut dan kedalaman air 1000 m.
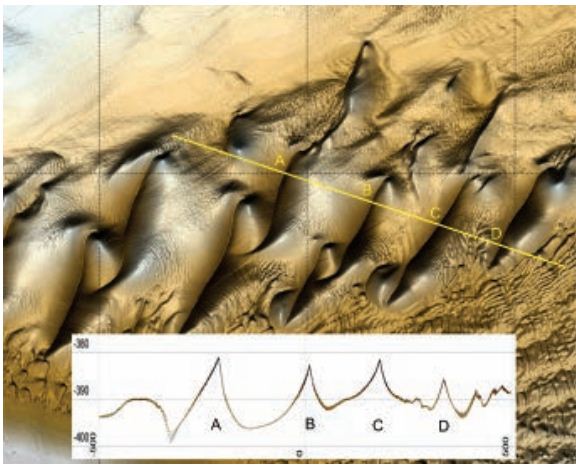
Gambar 2 Hasil AUV data MBES

Gambar 3. Hasil AUV data SSS

Gambar 4 Hasil AUV data SBP[/caption]
Sumber: campbell, Kerry j.,Kinnera, S., Thame, A.(2015) AUV technology for seabed characterization and geohazards assessment.TLE









0 comments:
Post a Comment